菜单
8
退出
报价单为空
前往报价单
CLOSE
首页
产品
产品
产品查找器
单轴气浮运动台
单轴气浮运动台
QFL系列气浮运动台
QFL-FH系列气浮运动台
QFU系列气浮运动台
QFU-FH系列气浮运动台
QFU-KB系列气浮运动台
QFL-KB系列气浮运动台
气浮转台
气浮转台
QFR系列气浮转台
NOTE系列气浮转台
NOTE-AB轴系列气浮转台
QFR-TK系列通孔气浮转台
多轴气浮运动台
多轴气浮运动台
QFHDS-XY系列平面式气浮运动台
QFL-XY系列双轴气浮运动台
QFL3D系列三轴气浮运动台
QFL-XY-SG系列三轴精密运动台
QFL-XY-5XX三轴精密运动台
QFL-FH-T系列气浮运动台
QFU-A系列双轴气浮运动台
QFHDSiC-XY系列碳化硅平面式气浮运动台
单轴线轨运动台
单轴线轨运动台
RBLM系列精密运动台
RBN系列精密运动台
RBSG系列精密运动台
RBN-SG系列精密运动台
机械转台
机械转台
JXRAB系列AB轴机械转台
JXR系列机械转台
JXR-TK系列通孔机械转台
多轴线轨运动台
多轴线轨运动台
RBN-XY系列双轴精密运动台
RBN-XYZ系列三轴精密运动台
RBN-XY-SG系列三轴精密运动台
RBLBAC-XY系列双轴精密运动台
RBLM-XY系列双轴精密运动台
RBLM-XYR系列三轴精密运动台
RBZK-XY系列双轴中空精密运动台
RBLBAC-XY-SG系列三轴精密运动台
RBN-XY-5XX系列三轴精密运动台
精密Z轴
精密Z轴
QFLZ系列精密气浮Z轴
QFUZ系列精密气浮Z轴
RBNZ系列精密Z轴
RBN-Z-CG系列精密Z轴
RBN-Z-5XX系列精密Z轴
RBZ-SG系列精密Z轴
RBZ-QH系列精密Z轴
RBLM-Z-CG系列精密Z轴
笛卡尔龙门系统
笛卡尔龙门系统
QFHDS系列三轴超精密运动台
QFU-XYZ系列三轴气浮运动台
RBLM-XYZ系列三轴精密运动台
RBLM-XZ-Y系列三轴精密运动台
RBLM-XY-ZSG系列三轴精密运动台
RBN-XY-Z(DLM)三轴精密运动台
RBHXG系列龙门系统
定制系统
定制系统
QFHDS-350-350-100Z 三轴精密运动台
JXR-1R-15Z两轴精密运动台
QFHDS-1000XY-100Z三轴精密运动台
QFU-170-360R双轴气浮运动台
QFL-300-200-200Z-360R四轴气浮运动台
QFU-300-275-360R-100Z-360R五轴精密运动台
RBN-160-50Z-360R三轴精密运动台
RBN-200XY-150Z-AB五轴精密运动台
RBXG-750双动子精密运动台
RBXG-750-800两轴精密运动台
RBXG-210XY-50Z-AB五轴精密运动台
RBXG-800-200-12D5-1R-15五轴精密运动台
RBXG-800-600-450Z-AB五轴精密运动台
RBZK-300XY-150Z三轴中空精密运动台
RBXG-971-340-12D5 三轴精密运动台
RBN-7单轴精密运动台
RBN-170-30Z-360R三轴精密运动台
RBXG-500-360R-160Z三轴精密运动台
RBXG-300XY-300Z-AB五轴精密运动台
RBXG-600-200-150Z1-100Z2-AB六轴精密运动台
RBXG-FS-200-200-150Z三轴防水精密运动台
QFU-200-200-150Z-30SG四轴精密运动台
RBN-200-360R双轴精密运动台
RBLBAC-300XY-150Z三轴精密运动台
QFHDS-200XY-20SG-50Z四轴精密运动台
RBLBAC-100XY-35Z-R四轴精密运动台
真空运动台
真空运动台
RBN-VC系列双轴真空运动台
RBN-VC-L双轴真空运动台
服务
服务
产品定制
现场服务
远程支持服务
解决方案
解决方案
微纳加工
测量检测
精密加工
半导体
专业知识
专业知识
指标定义
指标定义
指标定义
专业术语
核心技术
测试方法
视频资料
视频资料
微纳加工
测量检测
精密加工
半导体
下载中心
下载中心
产品样本
产品手册
CAD图纸
3D模型
关于瑞邦
关于瑞邦
公司介绍
瑞邦证书
瑞邦证书
专利证书
荣誉证书
质量认证
新闻资讯
新闻资讯
公司动态
行业资讯
企业风采
联系我们
联系我们
定制咨询
加入我们
产品查找器
联系我们
服务
下载
专业术语
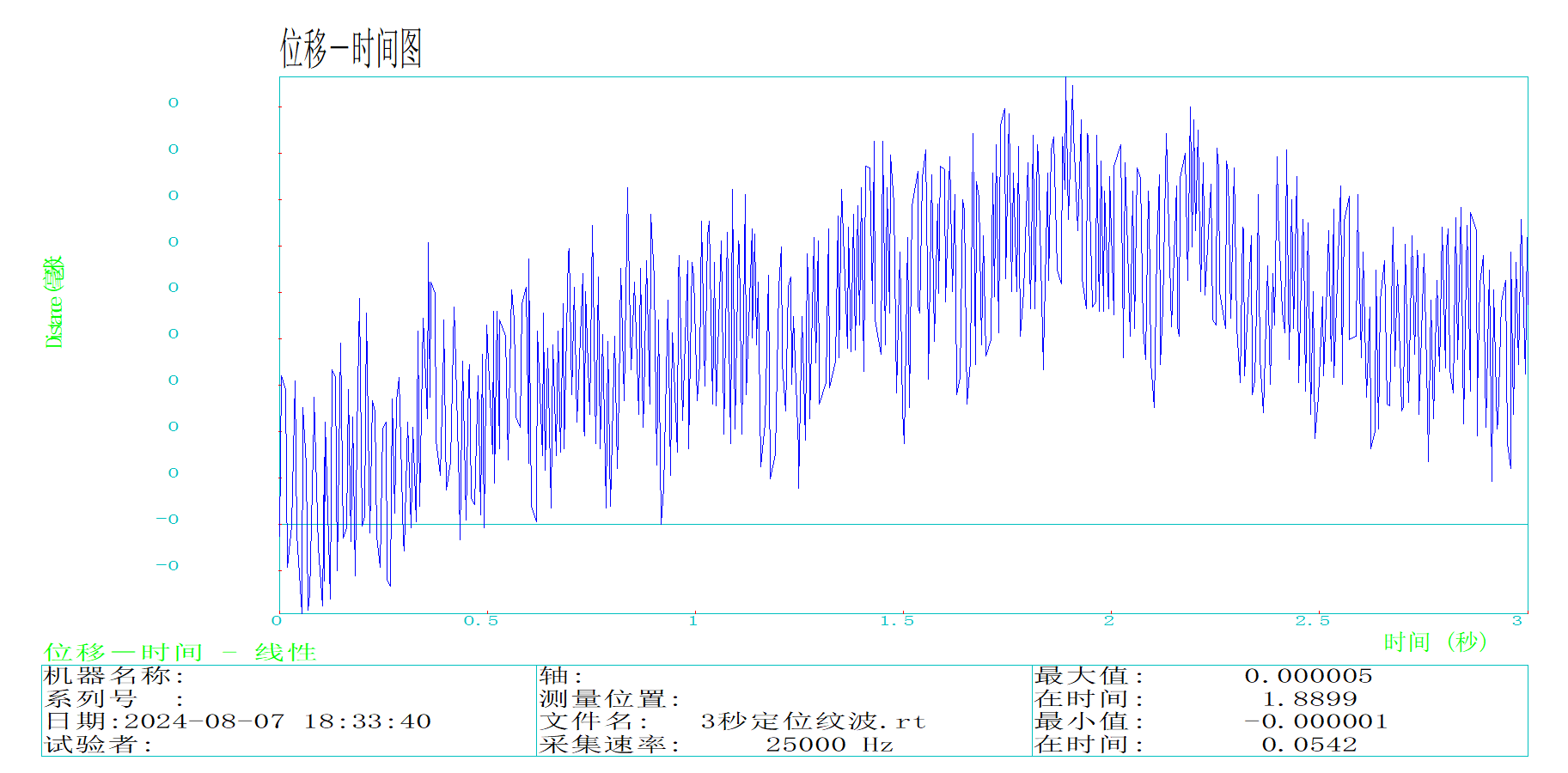
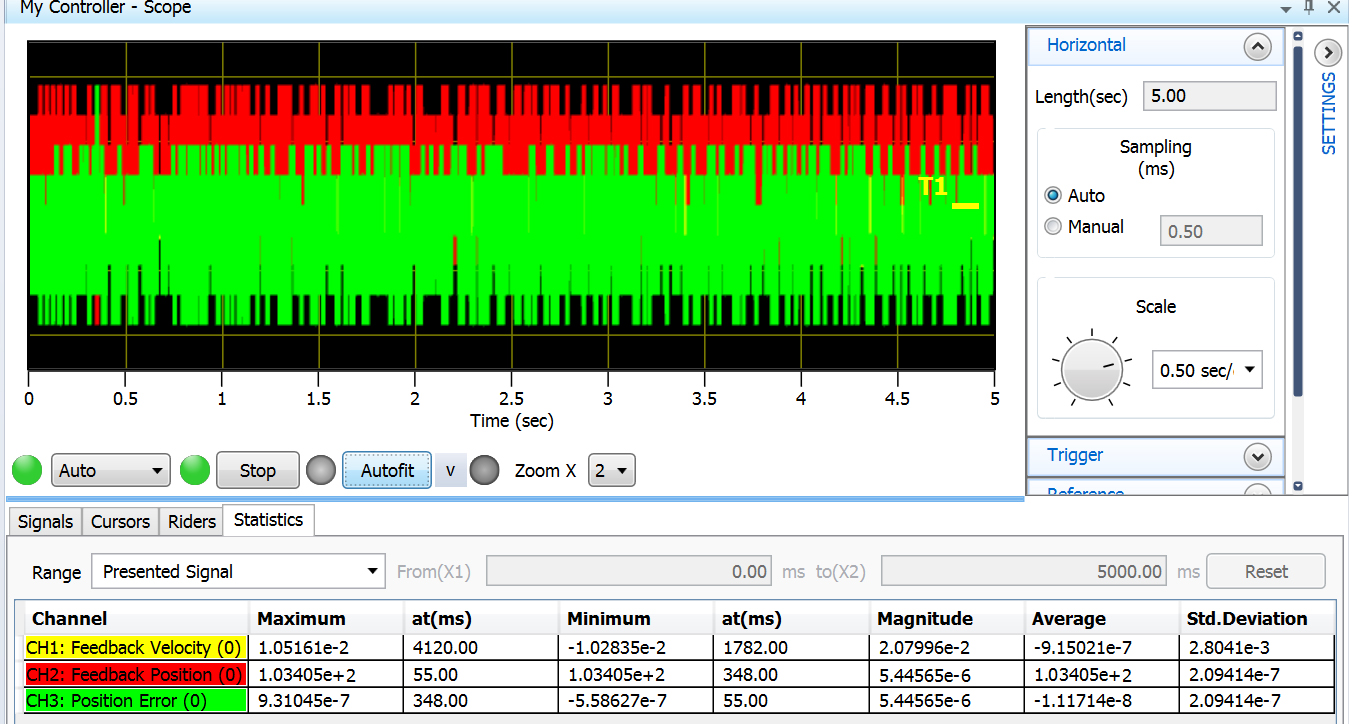
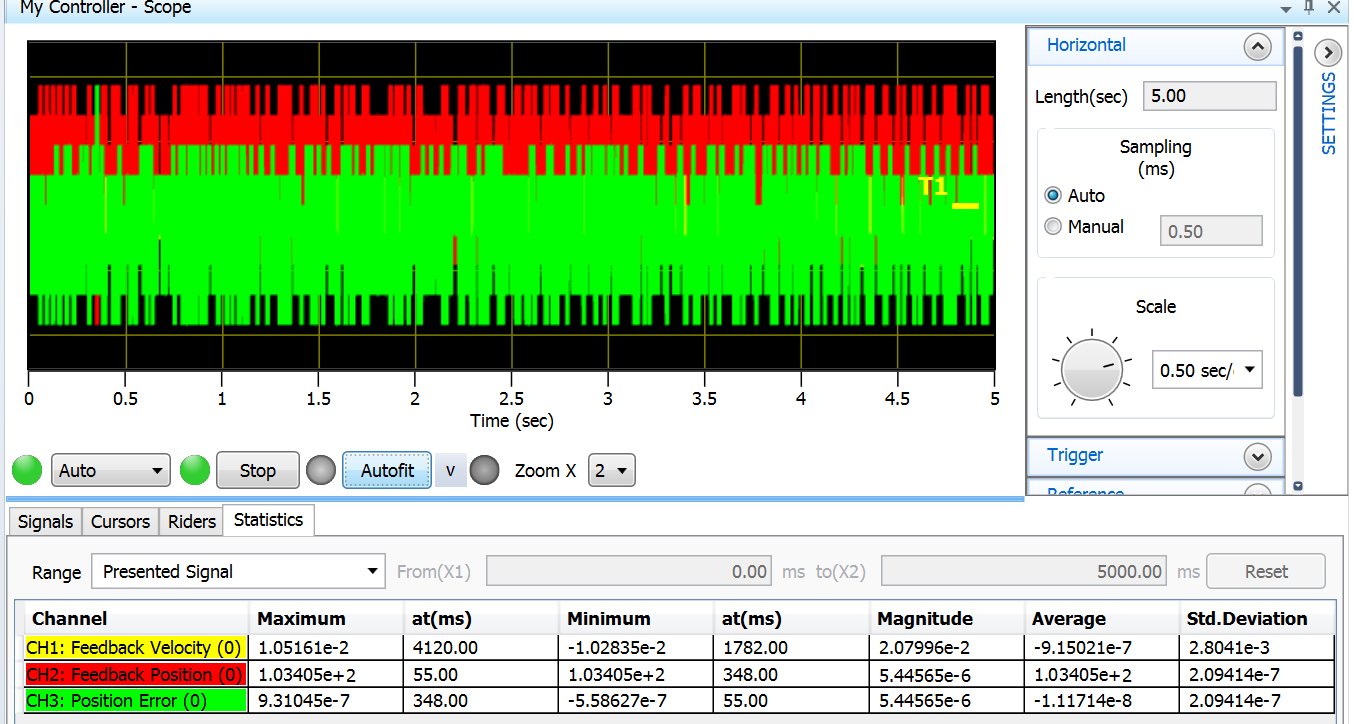
定位纹波
定位纹波也称“定位抖动”、“稳态误差”、“在位稳定性”,是指位移台在实现精密定位指令时,实际位置与目标位置之间的动态波动或振动导致的偏差。通常是位移台在静态停止过程中,因产品结构、控制算法或外部干扰等因素导致的位置误差。
速度均匀性
速度均匀性是指位移台在恒定指令速度下运行时,实际速度与目标速度的偏差程度,是运动过程中速度变化的稳定性,通常以速度波动率或相对误差来衡量。这一指标直接影响了位移台的动态性能,在高精度应用中尤其重要。
跟随误差
跟踪误差是指在位移台运动过程中,从开始运动到实际位置的时间段内的位置命令与实际位置的差值。
机座安装面
机座对直线平台的性能起着重要的作用。通常要求机座的表面必须保证局部平面度<5µm,将工作台安装在平面度差的机器底座上,会使工作台变形,变形会导致Pitch,Roll,Yaw,平面度和直线度的误差大于所列的精度指标。
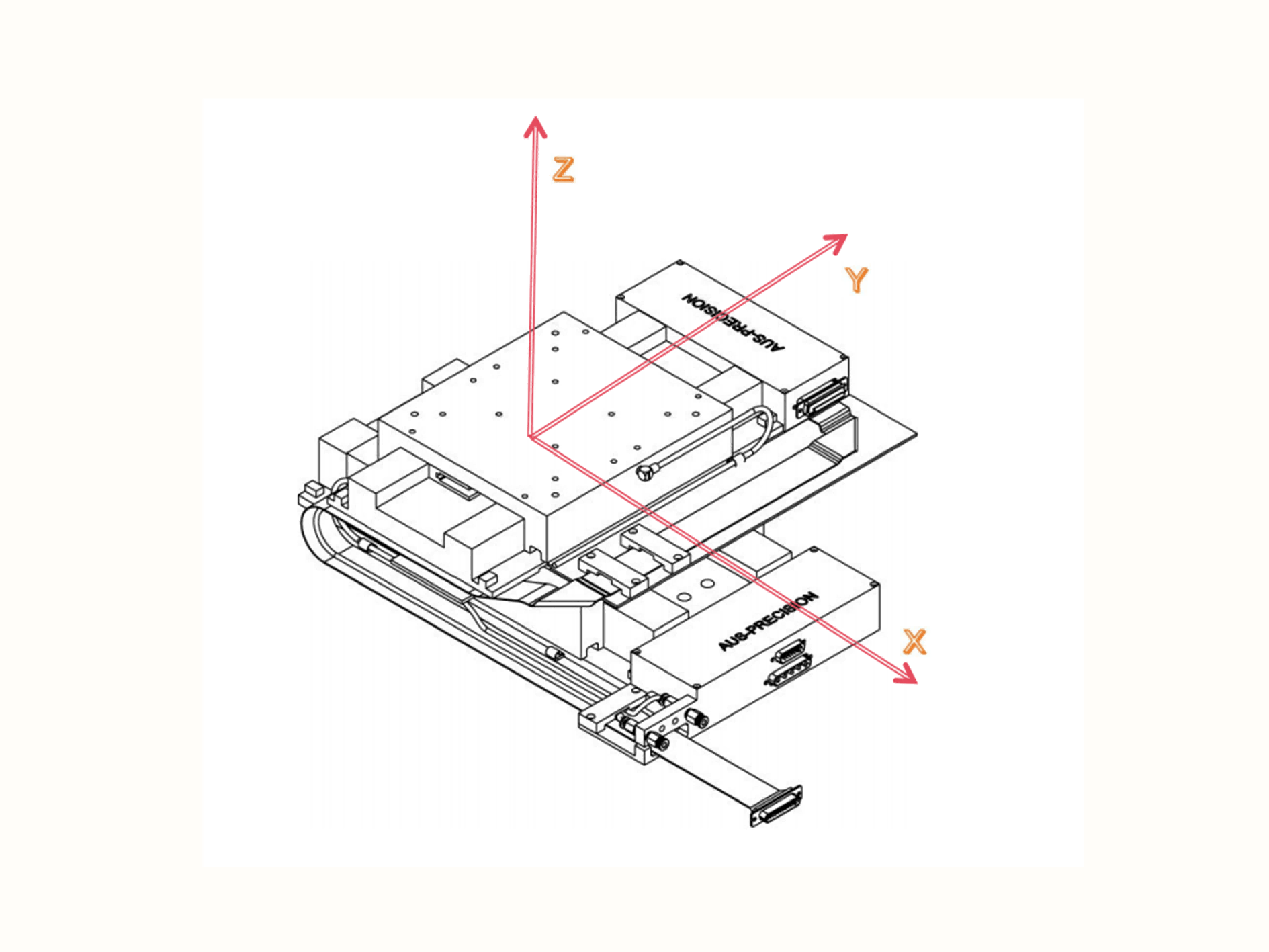
正交性
为了精确沿X轴和Y轴运动,Y轴运动线必须与X轴运动线垂直正交。如果两条运动线不正交,Y轴将在X方向上产生位置误差,误差的最大值可以通过行程角误差的sin值来确定。
反向间隙
反向间隙是由于在行程移动方向的反转引起的位置误差。反向运动是指令运动的一部分,要求在运动方向反转时不会产生位置变化。齿隙是由传动系统中元件之间的间隙引起的,随着间隙的增加,间隙误差也增大,反向间隙影响双向重复性,基于直线电机运动平台是直接驱动的,因此具有零间隙。
迟滞误差
迟滞误差是由运动系统中的弹性力引起的实际位置与测量点的指令位置之间的偏差。迟滞还会影响双向重复性,由迟滞引起的定位精度和重复性精度已包括在精度表中,设备的基座、负载和负载耦合硬件中的弹性力没有考虑在内,也需要确认并最小化获得最佳性能。
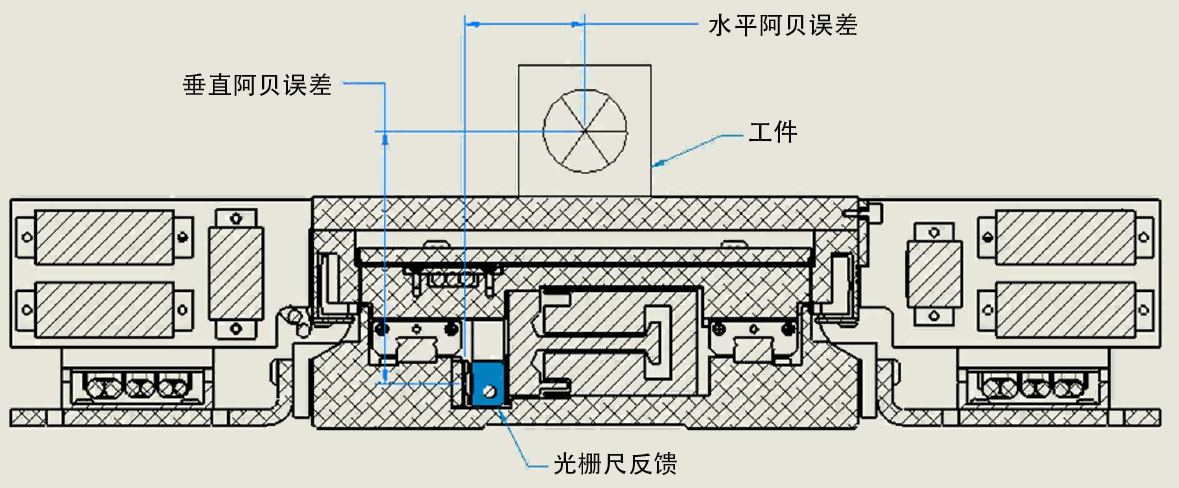
阿贝误差
阿贝误差是由导轨的角误差和工作点与驱动机构(滚珠丝杠)或反馈机构(线性编码器)之间的偏移距离引起的位移误差。俯仰是围绕与运动方向垂直的水平面上的旋转角度误差。如果被测量点的位置不在旋转中心,那么俯仰将在XY轴上引起阿贝误差。对于X轴,俯仰将导致在X和Z方向的阿贝误差。对于Y轴,俯仰将导致在Y和Z方向的阿贝误差。这些误差的大小可以通过×偏移距离的sin和1-cos的旋转角度来确定。